
ROVito — Remotely Operated Underwater Vehicle
A compact, powerful and highly maneuverable inspection-class ROV designed for underwater imaging, inspection and light intervention tasks. Optimized for inshore and confined-water operations, ROVito delivers high-quality visual data while operating safely in environments unsuitable for human divers.
Overview
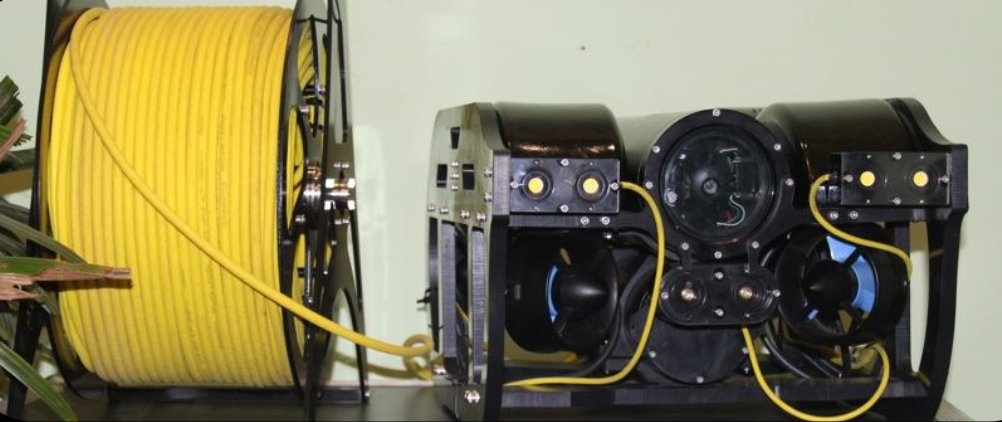
ROVito is a versatile Remotely Operated Vehicle (ROV) built for underwater inspection, navigation and monitoring tasks. ROVs eliminate the need for divers in hazardous or deep environments, improving safety while delivering accurate visual and sonar-based data.
Equipped with advanced cameras, lighting, and a neutrally buoyant tether system, ROVito enables precise maneuvering even in low-visibility conditions. When paired with sonar, it becomes capable of navigating in murky waters and inspecting pipelines, reservoirs and critical underwater infrastructure.
By reducing downtime, boosting inspection quality, and improving operational safety, ROVito is an ideal tool for water utilities, research institutes, offshore operations, and industrial inspection teams.
Technical Specifications
| Endurance | Minimum 120 minutes |
|---|---|
| Dimensions | 500 × 400 × 500 mm |
| Diving Depth | 100 m |
| Rated Speed | 2 knots |
| Max Speed | 4 knots |
| Thrusters | 6 total |
| Communication | Tethered |
| Tether | 150 m neutrally buoyant |
| Tether System | Slip-ring spool, 150 m |
| Cameras | 2 × 2 MP (1080p) + Offline 4K Camera |
| Lights | 4 × 1500 lumen underwater LEDs |
| Weight | 9–10 kg |
| Buoyancy | Slightly positive |
| Battery | 10,000 mAh Li-ion rechargeable |
| Payload Capacity | 1.5 kg |
| Ground Control Station | Laptop with latest Core i3 processor |
Payload & Sensor Options
- 2 MP real-time FPV cameras
- 4K offline recording camera
- High-intensity LED lighting (4 × 1500 lumen)
- Neutrally buoyant tether up to 150 m
- Sonar module (optional)
- Environmental sensors (custom)
- Interchangeable light/inspection tools
Key Capabilities
- Ideal for reservoirs, tanks, pipelines and confined-water inspection
- Stable, precise maneuvering using six-thruster configuration
- High-quality imaging in low-visibility environments
- Real-time tethered communication with zero latency
- Suitable for research, industrial and environmental tasks
- Lightweight, easy to deploy and recover